
mile米乐m6下载链接 / NEWS
| 首页 > 新闻中心 > mile米乐m6下载链接新闻

mile米乐m6下载链接
NEWS
mile米乐m6下载链接:他在同济学汽车今年拿下CVPR最佳学生论文奖
发布时间:2022-07-01 来源:米乐M6官网首页 作者:米乐m6网页入口
奖项颁了二十多届,今年第一次颁给来自中国高校的学生一作,打败了哈佛大学博士生&谷歌的另一篇论文研究。

转方向前,他对汽车动力学同样兴趣十足,曾经加入过赛车队,主导空气动力学开发,最终团队在大学生国际赛事上获了奖;
读研第一年,论文就入选了CVPR,但却因为理论不够充分,转而继续深入研究,才有了今年这篇最佳学生论文奖。
一入学他就参加了同济翼驰车队。这是一个上百人组成的学生社团,在学校、学院和赞助商支持下,每年都会设计、制造赛车并参加国内和国际比赛。
他渐渐成为车队的骨干,还助力团队在2018年的日本大学生方程式赛车上拿了最佳空气动力学奖。

其实汽车和计算机都是陈涵晟从小开始就有的爱好,他表示自己也搞不清楚更喜欢哪个,另外数学也是他一直感兴趣的学科。

熊璐现任同济大学新能源汽车工程中心副主任,长期从事汽车底盘控制、分布式驱动电动汽车动力学控制相关科研工作,
在研究生阶段陈涵晟还有一位副指导老师,同济大学汽车学院助理教授田炜,他主要研究智能驾驶的环境目标感知技术和轨迹预测技术。
转方向、学习交叉学科压力会很大吗?陈涵晟认为对他来讲并不会很累,反而两个领域的碰撞总能让他产生更多灵感。
这篇文章是根据经验设计的,虽然模型效果好但我不明白他为什么效果好,也无法用数学理论去证明这个方法就是最优的。


因此,如何让计算机学会通过2D照片估计3D物体的位置和朝向,就变成了一个需要解决的问题,像自动驾驶(用摄像头估计车辆位置)、AR(判断虚拟物体距离)等领域都要用到:

几何推理,最常见的就是PnP(Perspective-n-Point)算法,具体指通过已知的n个3D空间点(c1、c2、c3、c4)的坐标、对应2D平面上点的坐标,结合相机内参来反推相机的位姿。
本质上来说,就是找到3D空间点的坐标系w以及相机坐标系c的对应关系,来推导出相机和这些3D点的空间距离:
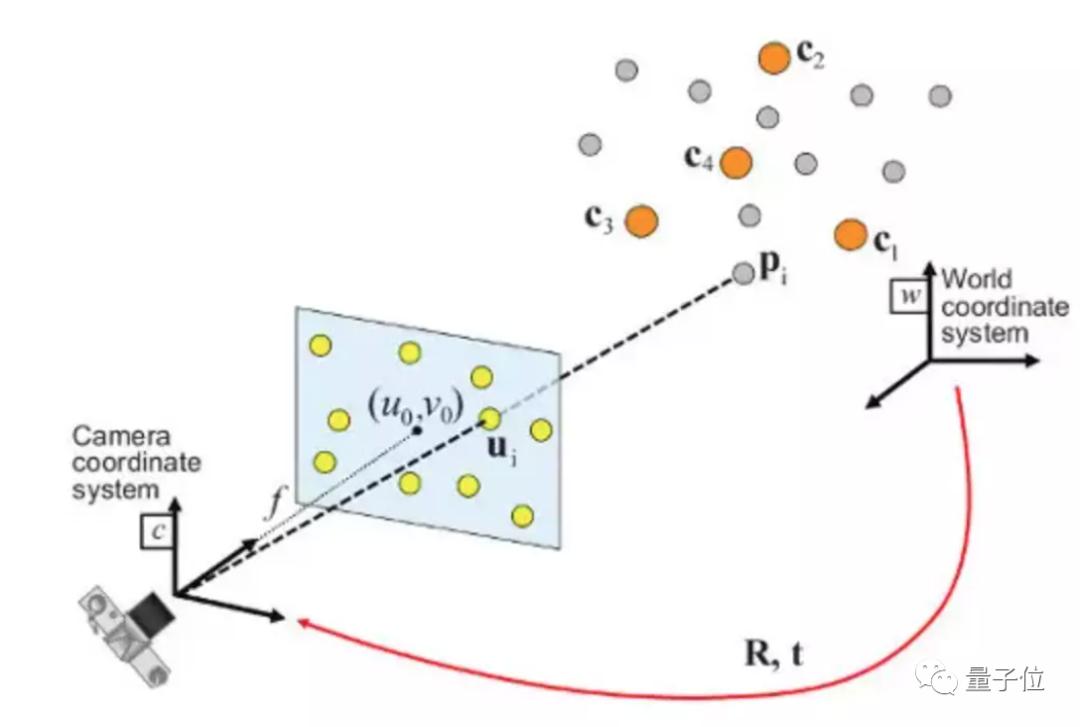
这个方法非常简洁,原理也好理解,然而必须得有一大堆参数(3D、2D坐标和对应的相机内参)才能计算出结果。现实是往往只能用一张2D照片做估计,没有对应的3D坐标。
但这样问题又来了,不仅模型可解释性差,预测结果不一定准确,而且数据集样本量少的时候,还非常容易过拟合。
相比用自监督方法直接学习位姿,这篇论文先用自监督方法学习2D和3D坐标之间的关系,再用PnP算法求解。

论文估计了坐标预测结果的不确定性,并用不确定性PnP算法,让模型学会关注不确定性较低的前景点(检测对象的点)。
MonoRUn做出来后,效果很好,不需要提前知道物体的几何形状,就能预测3D位姿,直接登上CVPR 2021。
也就是说,上一篇论文把不确定性引入PnP算法,虽然效果很好,但本质上将PnP视为确定性这一操作并不可导。
也就是说,将PnP的输出视为位姿的概率密度函数,这样问题就从不可导变成了可导,这便是End-to-end Probabilistic Perspective-n-Points(EPro-PnP)算法的由来。

这次的模型做出来后,灵活性和可解释性都得到了很大的提升,收敛也稳定多了,最终在CVPR 2022中获得最佳学生论文奖。
达摩院的研究氛围很好,与他同期的一组实习生虽然做的都是不同方向,但经常和带他们的几位老师在一起讨论问题。
搞这项研究期间,达摩院的导师王丕超还特意帮他多申请了一台服务器,才能顺利完成整个模型的研究训练。

很多时候他面对一个课题不是先把领域内的文章通通看一遍,而是自己先尝试,有了比较完善的想法之后再去读论文。
版权所有 © mile米乐m6下载链接-官网首页网页入口 65010202000102号
COPYRIGHT(C)2005 XINJAING GUANGHUI INDTUSTRY INVESTMENT (GROUP) CO.,LTD ALL RIGHTS RESEARVED
